ООО «РудХим» специализируется на производстве эмульгаторов, обратных эмульсий
для горнорудной, нефтегазодобывающей промышленности и предприятий ведущих обработку металла.
Реклама. ООО «РудХим», ИНН 3121001572
erid: 4CQwVszH9pWxnpW9r62
Если рассматривать дегазацию шахты в целом, то можно выделить следующие основные задачи:
1) максимизация коэффициента эффективности дегазации;
2) максимизация величины общего дебита метана Ωdeg.m
3) поддержание значений Kdegeff и на достигнутых уровнях.
Коэффициент эффективности дегазации принято определять следующим образом: K^{deg}_{eff} = \Omega^{deg}_{m} / (\Omega^{deg}_{m} + \Omega^{vent}_{m})
где Ωventm — объем метана, откачеваемого средствами вентиляции.
Таким образом, максимизация общего дебита метана непосредственно способствует повышению эффективности дегазации, поэтому можно сосредоточиться только на задачах 2 и 3.
Рассмотрим задачу 2 более подробно. Впервые данный вопрос был проанализирован в работе [2], в более обобщенном виде задача максимизации дебита метана получила развитие в работе [1].
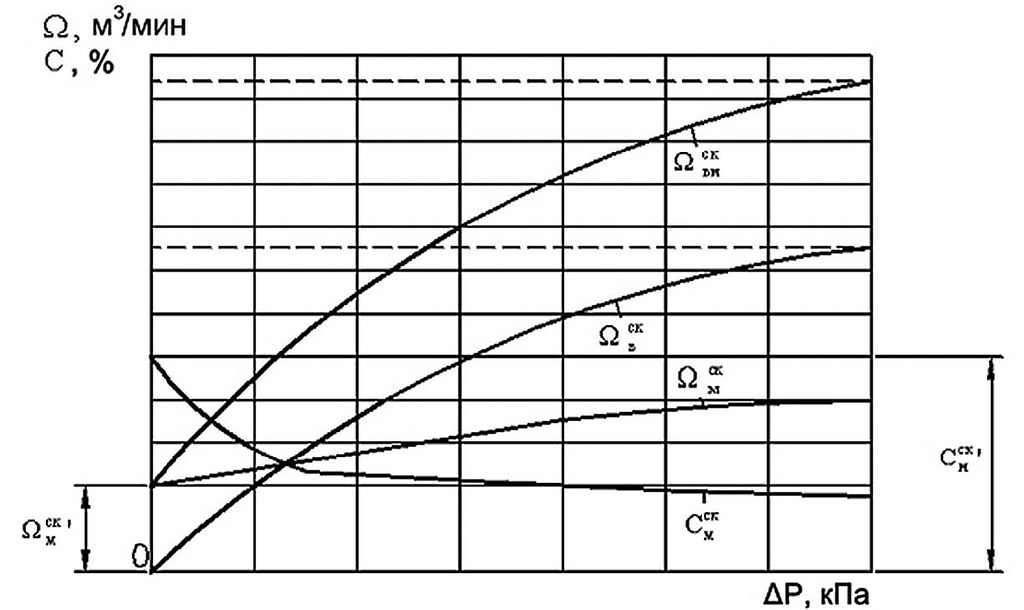
Основная идея этих работ заключается в том, что зависимость величины дебита метана в скважину определяется по следующей формуле (1):
где Ω ckmi — дебит метана из i-ой скважины; a ci — коэффициент, равный расходу метана в единицу времени через скважину при максимально возможном разрежении
a_{ci}=lim\Omega^{ck}_{mi}
bci — коэффициент, равный разности дебитов метана между максимально возможным значением (при ΔPcki → ΔPckabi) и значением при естественном отводе (Pck=0), a ci — коэффициент, характеризующий интенсивность нарастания производительности скважины за счёт увеличения разрежения; ΔPck — разрежение у устья скважины (относительно давления шахтной атмосферы).
Величина подсосов воздуха в скважину — Ω ckbi= βci * ΔPck i, где βci — степень негерметичности. Концентрация метана в метановоздушной смеси, извлекаемой из скважины, C^{ck}_{mi} = \frac{\Omega^{ck}_{mi} \times 100}{\Omega^{ck}_{mi}+\Omega^{ck}_{bi}}
Так как в рамках дегазационной системы работает несколько скважин, то задача максимизации дебита метана из шахты может быть представлена как (2):
\Delta^{deg}_m = \sum\limits_{i=1}^n \Omega^{ck}_{mi}\rightarrow max
Таким образом, устанавливая необходимое разряжение у устья каждой скважины (предварительно зная коэффициенты их функциональных зависимостей (1)), получим максимальное значение дебита метана.
В работе [2] эта задача постулируется как задача нелинейного программирования с нелинейной целевой функцией и ограничениями, а система управления — как активно приспосабливающаяся автоматическая система управления процессом дегазации шахты с замкнутым циклом адаптации.
Мы считаем, что в настоящее время параметрическая идентификация каждой дегазационной скважины в отдельности (определение значений коэффициентов зависимости (1)) является дорогостоящим, трудноосуществимым и, в конечном итоге, не целесообразным ввиду следующих причин:
— количество и расстояние между дегазационными скважинами в шахте может быть значительным;
— коэффициенты зависимости (1) могут со временем измениться вследствие уменьшения количества газа в пласте или проведения горных работ, оказывающих воздействие на дегазируемый пласт;
— запорно-регулирующая арматура с возможностью управления и система контроля параметров извлекаемой метановоздушной смеси являются дорогостоящим оборудованием, что делает невозможным оснащение всех скважин таким комплексом.
Вместо контроля и управления скважинами можно осуществлять контроль и управление отдельными дегазационными участками. Оборудовать участок необходимым набором технических средств возможно и целесообразно как с технической, так и с экономической точки зрения. Функциональная зависимость величины дебита метана с участка от разрежения на нём приближённо может быть описана формулой (1), так как дебит на участке равен сумме дебитов с каждой скважины. Имея необходимый набор технических средств, можно производить параметрическую идентификацию и последующую коррекцию коэффициентов функциональной зависимости (1) для дегазационного участка в автоматическом режиме.
Таким образом, основываясь на текущем уровне развития науки и техники, можно предложить построение двухуровневой системы оптимального управления с целевой функцией.
\Omega^{deg}_{m} = \sum\limits_{i=1}^{n} \Omega^{place}_{mi} \rightarrow max
Рис. 1. Зависимость параметров работы скважины от разрежения
На нижнем уровне будут располагаться системы стабилизации необходимого уровня разрежения на участках. Верхний уровень будет отвечать за идентификацию объекта управления и выработку оптимальных значений величины задания для систем стабилизации.
Исследование задачи управления выявило следующие её особенности. В первоначальный момент времени, непосредственно перед запуском системы управления, формулируются исходные сведения по объекту управления и о внешних воздействиях, что позволит провести параметрическую идентификацию объекта, синтез локальных систем автоматического регулирования и рассчитать для них величины задания, а также определить количество включенных насосов.
Однако в процессе работы системы свойства объекта управления могут меняться из-за изменения различных факторов, влияющих на протекание процесса дегазации. Это приведёт к тому, что не будет обеспечиваться необходимый уровень качества управления, т. е. дебит метана не будет максимальным для вновь сложившихся условий. Следовательно, нам необходимо фиксировать изменения, происходящие в объекте управления и приспосабливаться к новым условиям. Для того, чтобы достичь экстремума или вывести показатель качества в заданный диапазон, необходимо вновь рассчитать задания для локальных систем автоматического регулирования (САР) и определить количество работающих насосов. Менять структуру или параметры устройства управления в данном случае не следует, т. к. это не приведёт к требуемому результату. Дальнейшее изложение это покажет.
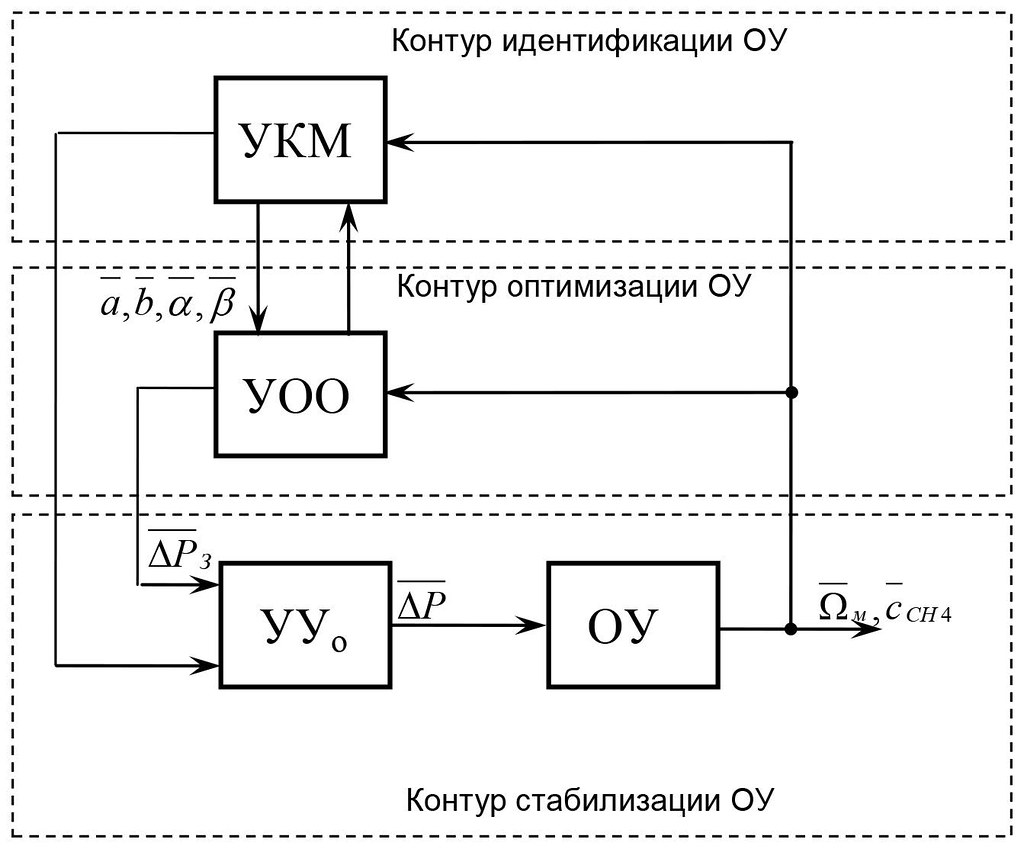
Рис. 2. Функциональная структура системы управления процессом извлечения метана
Итак, в разрабатываемой системе управления структура устройства управления остаётся неизменной, будут рассчитываться лишь величины заданий для локальных САР и количество включённых насосов, следовательно, систему можно отнести к классу самонастраивающихся. По способу получения заданий для локальных САР систему управления можно отнести к комбинированному типу, т. е. расчёт заданий осуществляется аналитическим способом, но при этом для конечной корректировки могут быть использованы поисковые методы. Необходимость использования принципов адаптации способствует устранению влияния изменяющихся свойств объекта управления на показатель качества управления.
Таким образом, в итоге, проектируемая система управления может быть отнесена к самонастраивающимся комбинированным адаптивным системам управления с настройкой по характеристикам объекта управления с оптимизацией статического режима работы.
Функциональная структура системы управления приведена на рис. 2.
Система управления состоит из трёх контуров: контур стабилизации объекта управления, контур оптимизации объекта управления и контур идентификации объекта управления. Контур оптимизации ОУ определяет наилучший режим функционирования объекта управления на основании информации об управляемой величине и управляющих воздействиях. В соответствии с полученным решением УОО выдает окончательное задание контуру стабилизации и определяет количество насосов, которое необходимо ввести в работу. Темп работы контура оптимизации значительно более медленный по сравнению с темпом ОУ. Контур стабилизации предназначен для поддержания ОУ в требуемом состоянии. Темп работы УУО совпадает с темпом ОУ.
Внутренний контур стабилизации установленных значений разрежения на участках может быть выполнен на базе одного из типовых законов регулирования (П, ПИ, ПИД). Контур идентификации предназначен для слежения за изменениями объекта управления, которые сказываются на изменении показателя качества. При выходе показателя качества за установленные границы УКМ может взять (перехватить) управление системой на себя и скорректировать модель, подавая необходимые пробные воздействия.
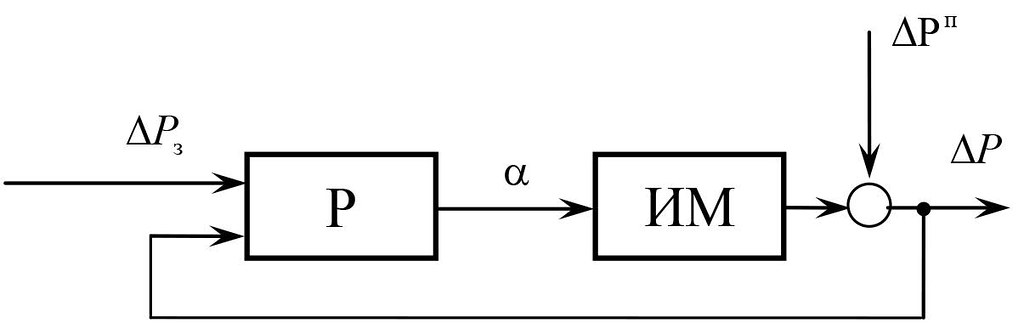
Контур стабилизации разрежения реализует принцип управления по отклонению. Функциональная схема приведена на рис. 3.
Рассмотрим более подробно работу системы верхнего уровня. Основными элементами системы являются устройство корректировки математической модели (УКМ) и устройство оптимизации (УОО ).
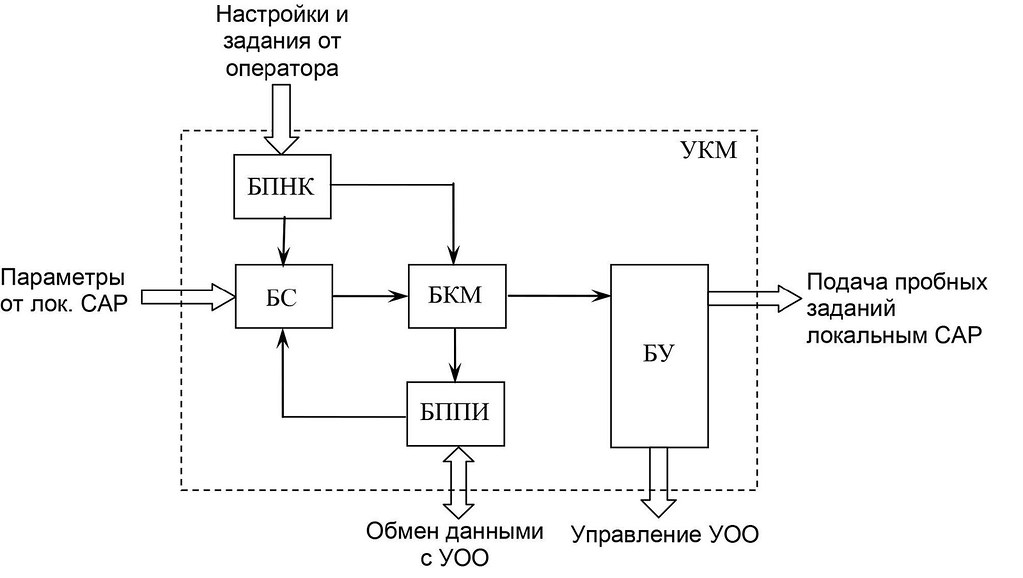
Рис. 4. Структурная схема устройства корректировки математической модели
Устройство корректировки математической модели выполняет следующие функции:
— определение выхода показателей работы системы за требуемые границы;
— построение новой математической модели путём подачи пробных воздействий на объект управления;
— передача рассчитанной математической модели устройству оптимизации;
— управление устройством оптимизации (остановка работы (для построения модели), запуск системы с оптимальными заданиями).
Структурная схема устройства корректировки математической модели представлена на рис. 4, оно состоит из блока приёма настроек и команд БПНК, блока сравнения БС, блока корректировки математической модели БКМ, блока приёма/передачи информации БППИ и блока управления БУ. Блок приёма настроек и команд (БПНК) принимает различные настроечные параметры (величина отклонения целевой функции от заданного значения и т. п.) и команды (например, произвести корректировку математической модели) от оператора системы. Блок сравнения (БС) принимает от локальных систем автоматического регулирования значения дебита метана и концентрации метана сравнивает их со значениями, рассчитанными устройством оптимизации. Эти значения БС получает от БППИ. В случае, если значения отклоняются от заданных на величину, превышающую допустимое значение, то БС даёт БКМ команду о необходимости скорректировать математическую модель. Когда УКМ работает в режиме корректировки математической модели, БС выполняет функции устройства приёма передачи сигналов. блок корректировки математической модели (БКМ) принимает от БПНК или БС команду на корректировку модели. БКМ через БУ подаёт пробные задания локальным САР, принимает данные через БС (в данном случае уже без сравнения) и рассчитывает новые коэффициенты математической модели. Полученную новую математическую модель БКМ посылает в УОО и отправляет команду на запуск процедуры расчёта оптимальных значений. Блок приёма/передачи информации (БППИ) передаёт устройству оптимизации математическую модель системы извлечения метана, а также принимает значения рассчитанных величин дебита метана и концентрации метана в результате оптимизации. блок управления (БУ) передаёт пробные задания локальным САР во время корректировки математической модели, а также команды для устройства управления на расчёт новых величин задания и остановку его работы.
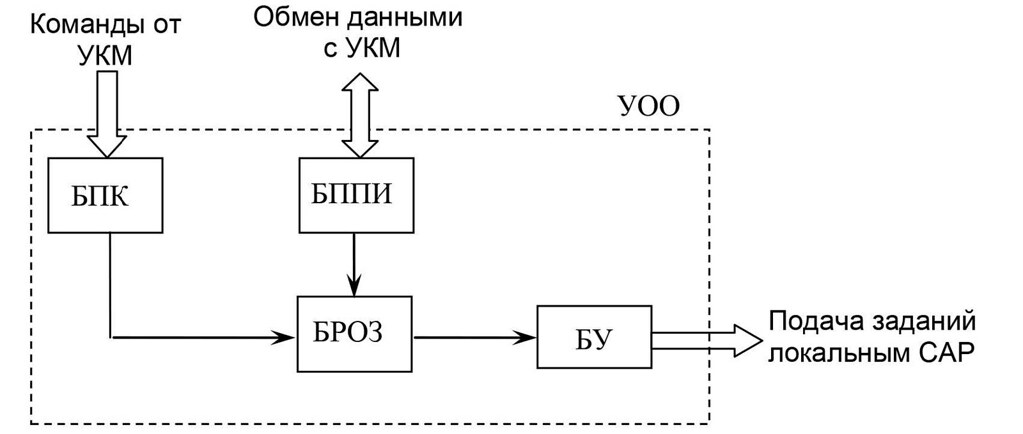
Рис. 5. Структурная схема устройства корректировки математической модели
Устройство оптимизации выполняет следующие функции:
— расчёт оптимальных значений заданий для локальных САР;
— определение количества работающих вакуум-насосов в системе;
— выдача заданий локальным САР.
Структурная схема устройства оптимизации изображена на рис. 5, оно состоит из блока приёма команд управления БПК, БППИ, блок расчёта оптимальных значений заданий БРОЗ и БУ. Блок приёма команд управления (БПК)принимает следующие команды от УКМ:
— запуск расчёта оптимальных значений заданий для локальных САР;
— остановка выдачи заданий локальным САР.
Блок приёма/передачи информации(БППИ) выполняет те же функции, что и БППИ УКМ, только на стороне УОО. Блок расчёта оптимальных значений заданий (БРОЗ) рассчитывает оптимальные значения заданий для локальных САР по заданному алгоритму с использованием математической модели, полученной от УКМ. блок управления (БУ) передаёт задания локальным САР, а также включает нужное количество насосов в работу через устройство управления насосами (УУН).
Библиографический список
1. Карпов Е. Ф., Рязанов А. В. Автоматизация и контроль дегазационных систем. — М.: Недра, 1983. — 190 с.
2. Бырька В. Ф., Местер И. М. Максимизация извлечения метана в шахтных дегазационных системах. // Известия вузов. Горный журнал. — 1970. — № 10.






















Спасибо!
Теперь редакторы в курсе.