Оказываем полный комплекс услуг для промышленных предприятий по всей территории России
•Сервисное обслуживание и ремонт горно-транспортной и строительной техники
•Подбор и аутстаффинг ремонтного и производственного персонала
•Поставка техники и запасных частей
INFO@OLIMP.BZ
+7 (916) 562-57-77
+7 (985) 006-00-78
Г. МОСКВА, УЛ. ОРШАНСКАЯ 5, ОФ. 6/5
Реклама. ООО «ОЛИМП», ИНН 5029236953
erid: F7NfYUJCUneVcxCEZqGY
Машинное зрение — это экономичный и надёжный метод мониторинга и управления флотационными системами. Машинное зрение выделяет из полученного видеокадра определённые количественные характеристики, которые являются отображением происходящих процессов. Эти характеристики можно измерять непосредственно с оцифрованных изображений путём сегментации изображения для выделения отдельного пузырька и получения его параметров.
Разработанный «НПО «РИВС» комплекс «MachineVision» предназначен для контроля в режиме реального времени свойств пены, основанный на современных технологиях и многолетнем опыте специалистов.
Принцип построения системы
В «НПО «РИВС» разработали и успешно испытали систему машинного зрения, которая позволяет использовать визуальные характеристики пены в системе автоматизированного регулирования флотацией, дополняя показания датчиков автоматизированной системы управления.
Первый необходимый шаг в реализации системы машинного зрения — разработка аппаратной и программной структуры системы машинного зрения. Разработчики АО «НПО «РИВС» выбрали распределённую структуру аппаратного комплекса, которая выражается в создании сегментов, состоящих из набора IP-видеокамер и вычислительного сервера. Оптимальным количеством было принято 8-10 видеокамер в сегменте. Необходимое количество сегментов определяется в ходе технологических исследований.
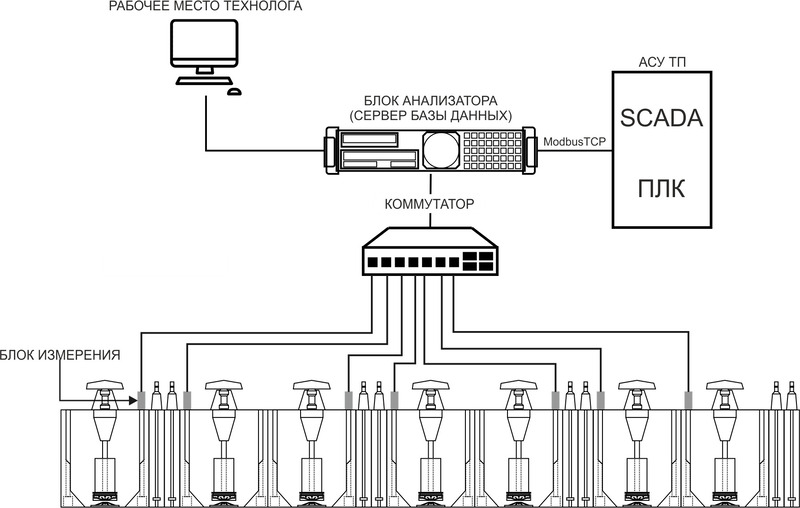
Рис. 1. Структура системы машинного зрения
Первичным звеном определили блок измерения, который оснастили компактной IP-видеокамерой, светодиодным освещением и ультразвуковым уровнемером. Корпус блока измерения обеспечивает светоизоляцию от посторонних источников света.
Аналитический сервер выполняет функции сбора видеосигналов, обработки изображения, исполнение алгоритмов компьютерного зрения с целью генерирования параметров пены из полученного изображения. Также аналитический сервер выполняет задачи архивирования изображений и рассчитанных параметров.
Интеграция с комплексом АСУТП фабрики выполнена посредством универсального промышленного интерфейса Modbus TCP. Архивная база данных также имеет распределённую структуру. В каждом сервере сохраняется поминутная база изображений.
Глубина архива фотоизображений составляет не менее месяца, видеоизображений — не менее трёх дней. При желании заказчика глубину архива можно увеличить. Также опционально система может быть дополнена центральным архивным сервером для резервного хранения данных.
Функции человеко-машинного интерфейса выполняет автоматизированное место оператора. Оно представляет из себя персональный компьютер с несколькими мониторами, который служит для вывода изображения с камер в реальном времени, а также для работы с архивами сохранённых изображений и параметров.
Программную часть машинного зрения в АО «НПО «РИВС» реализовали на высокоуровневом языке программирования Python. Прикладная часть выполнена с использованием библиотеки компьютерного зрения с открытым исходным кодом OpenCV. Для архивации используется свободная реляционная система управления базами данных MySQL.
Выполняя функции машинного зрения, комплекс предоставляет средствам АСУТП следующие сигналы:
расчётную оценку количественных и качественных характеристик размеров пузырьков на поверхности слоя пены (размеров пузырьков, распределения их по размеру);
стабильность скорости схода пенного продукта;
расстояние между видеокамерой и поверхностью слоя пены, используемое для расчёта толщины слоя пены;
анализ цветовых характеристик пенного продукта (опционально).
Метод машинного зрения
Типичными функциями машинного зрения являются следующие.
Получение изображения. Получение цифрового изображения от датчика изображения (светочувствительной матрицы). В результате преобразований получается массив цифровых данных. Его можно рассматривать как таблицу точек, число столбцов которой равно ширине матрицы, число строк — высоте матрицы. Для матрицы разрешением Full High Definition (FullHD) размер таблицы составляет 1920×1080 точек. Цветное изображение характеризуется тремя цифрами на точку: количеством красной, синей и зелёной составляющей в данной точке.
Предварительная обработка. Прежде чем методы компьютерного зрения могут быть применены к видеоданным с тем, чтобы извлечь определённую полезную информацию, необходимо произвести сжатие изображения до нужного разрешения, обрезать изображение, удалить шум, улучшить контрастность.
Выделение деталей. Детали изображения различного уровня сложности выделяются из видеоданных. Типичными примерами таких деталей являются линии, границы и кромки, локализованные точки интереса, такие как углы, капли или точки: более сложные детали могут относиться к структуре, форме или движению.
Детектирование/сегментация. На определённом этапе обработки принимается решение о том, какие точки или участки изображения являются важными для дальнейшей обработки. Примерами являются: выделение определённого набора интересующих точек, сегментация одного или нескольких участков изображения, которые содержат характерный объект.
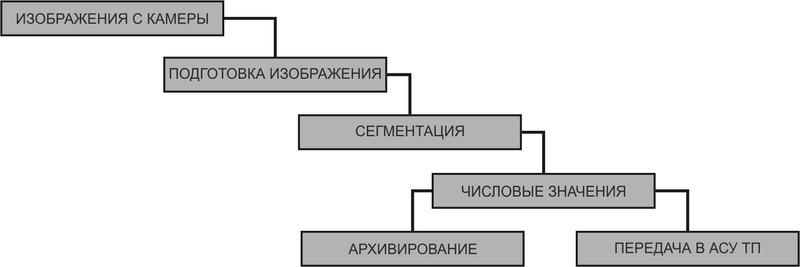
Рис. 2. Функциональная схема блока анализатора
Задача машинного зрения в данном применении — выделение из полученного видеокадра определённых количественных и качественных характеристик, являющихся отображением происходящих процессов флотации. К таким характеристикам пены относятся распределение размера пузырьков, их форма и цвет, динамические изменения в течении времени наблюдения.
Из всей визуальной информации наиболее важное значение имеют параметры геометрического размера пузырей. Результатом применения машинного зрения для каждого пузыря на изображении является его размер и положение на изображении. Наиболее удобным для исследования приняли распределение пузырей по размеру на десять классов. Диапазон каждого класса определяется экспериментально, при этом классы не перекрываются.
Метод машинного обучения
Предпосылками к использованию машинного обучения стала достаточная база изображений, сопоставленных с необходимыми метками. Метками в данном случае названо необходимое регулирующее воздействие: например, задание расхода воздуха, подаваемого в импеллер, задание расхода реагента.
Из видеопотока изображения архивируются с частотой три кадра в минуту. Структура архива файловая, то есть создаётся папка, именем которой является текущий год, в этой папке создаётся директория с номером текущего месяца, далее эта папка содержит папку с номером дня и в ней номер часа. В часовой папке поминутно архивируются изображения пены.
Сопоставляемые с изображениями регулирующие параметры получаются из АСУ флотомашины. В данном применении специалисты взяли три параметра: расход воздуха для аэрации и расходы по двум реагентам. Для первоначального обучения достаточно получить архив данных за месяц.
Задачами применения нейросети могут быть регрессия или классификация. Регрессия характеризуется сопоставлением изображения на входе с непрерывным цифровым сигналом на выходе модели, например, от 0 до 100%. Задачей классификации является отношение изображения к одному из классов, например, отношение размера пузырьков к классу от 1 до 10.
Таким образом, обучение модели в задаче регрессии будет решаться сопоставлением изображения непосредственно с регулирующими параметрами. Для того чтобы свести задачу обучения к задаче классификации, разработчики решили свести параметры регулирования к дискретным сигналам необходимого регулирующего воздействия.
Другими словами, каждое изображение сопоставляется с дискретным параметром необходимого регулирующего воздействия, например, «норма» — регулирование не требуется, «больше» — необходимо увеличить расход, «меньше» — уменьшить. При трёх параметрах (расход воздуха и двух реагентов) имеется 27 возможных сочетаний (классов).
В ходе опытной эксплуатации системы машинного зрения в феврале 2021 года специалисты АО «НПО «РИВС» провели этапы обучения на действующем оборудовании ОФ Кольской ГМК (г. Заполярный). Испытания проводились на пульпе вкраплённых медно-никелевых руд Печенгского рудного поля с сульфидной составляющей 5-10%.
На основе полученных данных сотрудники компании построили алгоритмы ведения флотации системой машинного зрения. В представленной концепции система машинного зрения определяет значения динамических заданий процесса. Исполнительные устройства — традиционно применяемые на каскадах флотомашин.
Анализ и классификация пузырьков
Для решения задачи качественного ведения процесса флотации в АО «НПО «РИВС» провели анализ и создали классификацию пузырьков по грансоставу c последующим распределением по диапазонам крупности и сопоставлением с контролируемым размером на каждом этапе.
Весь диапазона грансостава был разделён на два класса. Цель — обеспечить поддержание заданного (целевого) класса не ниже 70-80%. Граница разделения классов определяется на этапе опытной эксплуатации. Возможности узла измерительной видеокамеры позволяют обеспечить точность измерения размеров пузырьков = 2 пикселя.
Целевым классом в операциях основной и контрольной флотаций сульфидной руды экспериментально определён диапазон от 0 (условно) до 6 мм, некондиционным классом будет весь диапазон выше 6 мм. Причём наиболее показательным будет только некий участок в этом втором диапазоне — это наиболее устойчивая форма крупных пузырей, которая образуется при разрушении пузырьков целевого класса.
Рис. 3. Иллюстрация распределения пузырьков по классам на поверхности пены (сульфидная руда). Реализовано распознавание размера пузырьков и определение их принадлежности к целевому размерному классу.
Специалисты определили экспериментальным путём, что для этой формы характерен размерный диапазон 20-40 мм. Все другие размерные диапазоны некондиционного класса не имеют выявленной выраженной тенденции к изменению в зависимости от условий процесса.
Так как скорость импеллера постоянна (рассчитывается на этапе пусконаладки), её влияние на формирование размера пузырьков в контурах регулирования не рассматривается. Кондиционный пузырёк на поверхности пены имеет размер, формирующийся в толще пульпы (от импеллера — к поверхности) с учётом коалесценции, взаимодействия с реагентами и частицами пульпы.
Если на поверхности слоя пены имеется максимальное количество пузырей целевого класса и при этом поверхность пузыря плотная, то имеется признак качественного ведения флотации. Если на поверхности пены образуются пузырьки некондиционного класса, то это результат того, что пузырьки целевого класса коалесцируют в слое пены с образованием более крупных форм, при этом часть материала с оболочек переходит на поверхность пульпы и хуже удаляется из процесса. Влияние на коалесценцию многообразно, но в данном эксперименте определялась только её зависимость от плотности.
Интересно рассмотрение зависимости распределения пузырьков по размерным классам в питании ФМ основной флотации от плотности пульпы. В ходе промышленных испытаний разработчики системы на протяжении 168 часов вели непрерывный мониторинг процесса: контроль плотности в питании ФМ (радиоизотопный плотномер Berthold — данные предоставлены службой АСУТП ОФ), определение пузырьков по классам (установка машинного зрения РИФ-МЗ).
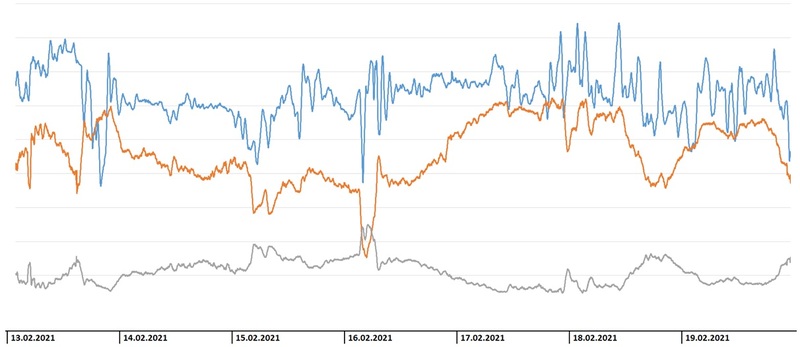
На рис. 4 и далее для всех наборов трендов: шкала «Х» — 168 часов (7 суток), шкала «Y» — сводная (для удобного рассмотрения).
Здесь представлена зависимость разделения флотационных пузырьков по классам в сопоставлении с текущей плотностью. Синий тренд — текущая плотность (т/м3), оранжевый — % содержание пузырьков класса «–6 мм»; серый — % содержание пузырьков класса «20-40 мм». Для регулирования плотности используется производная величина от содержания пузырьков классов «-6 мм» и «20-40 мм».
Этот график демонстрирует сопоставление текущей плотности питания ФМ (синий тренд) с производной величиной от содержания пузырьков классов «-6 мм» и «20-40 мм».
Если при стабильном поддержании плотности в питании флотации % содержание пузырьков целевого класса снижается, имеется необходимость регулирования (коррекции) задания на подачу реагента собирателя.
Анализ, настройка и регулирование скорости движения пены
Управление скоростью движения пены к порогу выполняют регуляторы расхода воздуха в границах, заданных технологическим регламентом и определяемым на этапе опытной эксплуатации верхним технологическим значением.
Диапазон расхода воздуха в камеру подбирают исходя из конструктива ФМ и назначения процесса. В качестве грубой стартовой настройки возможно использовать привязку к объёму ФМ и её типу. Существуют действующие нормативы расхода воздуха для каждого типоразмера ФМ. С большим приближением максимальный расход воздуха возможно определить, как: площадь поверхности (зеркала) камеры (м2) = значение расхода (м3/мин).
В большей степени нормативы актуальны для операций основной и контрольной флотаций. Для перечисток рабочий расход воздуха зачастую значительно ниже указанных нормативов.
Перед началом обучения системы машинного зрения необходимо проводить тестирование ФМ на реакцию изменения расхода воздуха. Скорость схода пены (по смещению пузырей на поверхности пены) измеряется системой машинного зрения (параметр «Скорость схода пены»).
При расходе = 0м3/мин (задвижка полностью закрыта) расход воздуха отсутствует. Замеряется скорость схода пены — она может быть отлична от нуля в силу процесса самопроизвольного стекания (сваливания) пены в жёлоб. Для определения верхнего рабочего предела регулирования необходимо зафиксировать расход, выше которого скорость схода пены перестаёт увеличиваться. Полученное значение с большой вероятностью будет отличаться от нормативного в меньшую сторону.
Значение скорости схода пены, которое принимается как целевое, определяется на этапе опытной эксплуатации. Значение расхода в м3/мин не является постоянной величиной для процесса, а динамически изменяется для поддержания целевой скорости схода пены.
Возмущающим фактором для регулятора расхода воздуха является изменение плотности пульпы.
Рис. 6. Сопоставление скорости схода пены от расхода воздуха в ФМ
Синий тренд — расход воздуха по данным АСУТП от сужающего устройства с измерительной диафрагмой, оранжевый тренд — приведённая скорость верхнего слоя пузырьков в направлении пенного желоба (по данным от системы машинного зрения).
Авторы статьи:
Фастунов Евгений Александрович Ведущий инженер-программист департамента АСУ АО «НПО РИВС»
Ладыгин Михаил Алексеевич Гл. специалист отдела новой техники и программирования департамента АСУ АО «НПО РИВС»
Сбежнев Роман Витальевич Руководитель отдела новой техники и программирования департамента АСУ АО «НПО РИВС»
Седов Алексей Викторович Директор департамента АСУ АО «НПО РИВС»

































Спасибо!
Теперь редакторы в курсе.